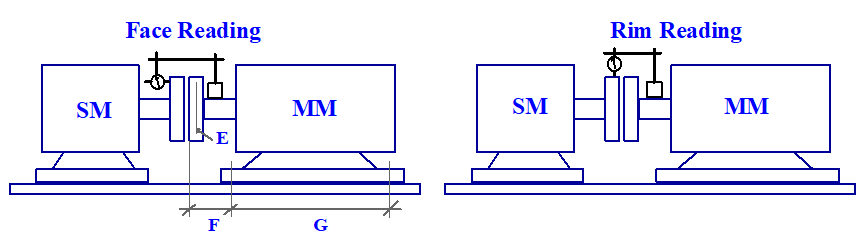
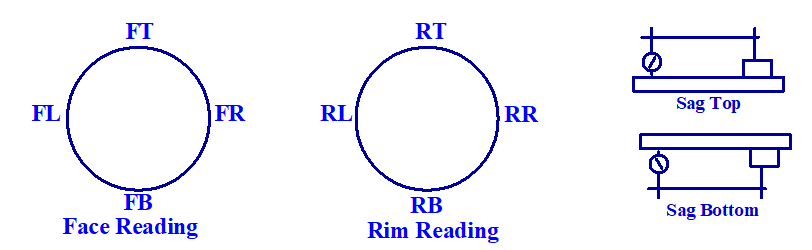
E = Coupling diameter | F = Coupling center to front foot | G = Front foot to back foot FT, FR, FB, FL = FACE TOP, RIGHT, BOTTOM, LEFT READINGS RT, RR, RB, RL = RADIAL TOP, RIGHT, BOTTOM, LEFT READINGS ST = SAG AT TOP | SB = SAG ERROR AT BOTTOM
VERTICAL ALIGNMENT
ANGULARITY A = (FT − FB) / E
PARALLEL P = ((RT − RB) − (ST − SB)) / 2
FRONT FOOT SHIM FFS = (A × F) + P
BACK FOOT SHIM BFS = (A × (F + G)) + P
+ sign ADD SHIM | − sign REMOVE SHIM
HORIZONTAL ALIGNMENT
ANGULARITY A = (FR − FL) / E
PARALLEL P = (RR − RL) / 2
FRONT FOOT MOVE FFM = (A × F) + P
BACK FOOT MOVE BFM = (A × (F + G)) + P
+ sign MOVE RIGHT | − sign MOVE LEFT
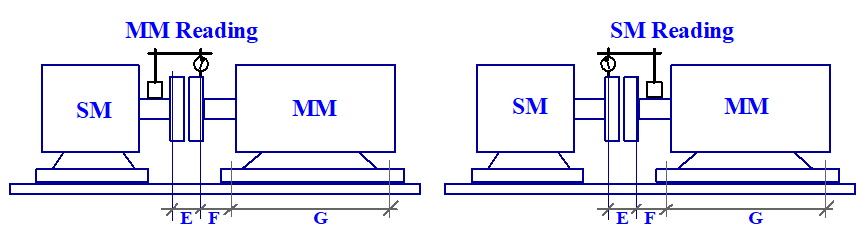
SHAFT ALIGNMENT (Reverse Indicator Method)
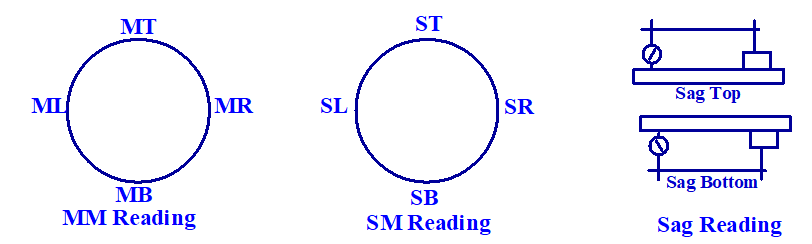
E = Dial center distance | F = MM Dial to front foot | G = Front foot to back foot MT, MR, MB, ML = MM (MOVING MACHINE) TOP, RIGHT, BOTTOM, LEFT READINGS ST, SR, SB, SL = SM (STATIONARY MACHINE) TOP, RIGHT, BOTTOM, LEFT READINGS ST-Sag = SAG AT TOP (SM) | SB-Sag = SAG ERROR AT BOTTOM (SM)
VERTICAL ALIGNMENT
MM OFFSET vMR = ((MT − MB) − (STsag − SBsag)) / 2
SM OFFSET vSR = ((SB − ST) − (STsag − SBsag)) / 2
FRONT FOOT SHIM FFS = (((vSR − vMR) × (E + F)) / E) − vSR
BACK FOOT SHIM BFS = (((vSR − vMR) × (E + F + G)) / E) − vSR
+ sign ADD SHIM | − sign REMOVE SHIM
HORIZONTAL ALIGNMENT
MM OFFSET hMR = (MR − ML) / 2
SM OFFSET hSR = (SL − SR) / 2
FRONT FOOT MOVE FFM = (((hSR − hMR) × (E + F)) / E) − hSR
BACK FOOT MOVE BFM = (((hSR − hMR) × (E + F + G)) / E) − hSR